Sampling av rumslig bild. Analoga och diskreta metoder för att representera bilder och ljud
eller varför filupplösningen måste överskrida rasterlinjen minst två gånger
En karakteristisk egenskap hos moderna trycksystem för bearbetning av halvtonsoriginal är att både den rumsliga samplingen av bilden och kvantiseringen av dess ton för nivå utförs minst två gånger. Spatial sampling är att ersätta en bild, vars ton varierar godtyckligt i X- och Y-koordinater, med en bild som består av individuella sektioner - zoner inom vilka denna parameter är medelvärde. I allmänhet, som redan nämnts, måste samplingsfrekvensen vara minst två gånger frekvensen för den harmoniska komponenten i originalbilden som ska reproduceras på kopian. Denna situation illustreras schematiskt i fig. 1 (a), vid position a), vars ursprungliga kontinuerliga meddelande är en sinusformad svängning och (t) med period T. Spektrum för en sådan signal består av en konstant komponent och den första övertonen:
u = U 0 +U l sin(27tt/T)
Ris. 1.
Den ursprungliga signalen (a), dess samplingsvärden och moduleringsdjup (%) vid noll (b), motsatt (c) och mellanfas (d) av samplingsfrekvensen.
Vid nollfas av diskreta prover U D period T/2 djupet av deras modulering av den första övertonen av den ursprungliga signalen är noll och frekvensinformationen är helt förlorad. Endast medelvärdet överförs U 0 originalsignal (se fig. 1, b). Med en förändring i fasen av sampel med halva deras period visar sig moduleringsdjupet vara lika med 100 % (se fig. 1, c). Mellanliggande mellan de övervägda faserna av avläsningar åtföljs av förvrängningar av amplituden och fasen för den första övertonen, även om, som grafen i fig. 1 (d), lagras information om dess frekvens. Åtminstone endimensionell (längs en av koordinaterna) bildsampling åtföljer processen för elektrooptisk analys. I analoga reproduktionssystem och TV omvandlas en optisk parameter, som är en funktion av koordinaterna för den ursprungliga eller den sända scenen, till amplituden av en elektrisk signal som ändras vid utgången av solcellscellen i tid under linjebyte -linjeavläsning (skanning). Spektrum av rumsliga frekvenser för bilden i riktningen tvärs linjens avsökningsriktning begränsas av frekvensen av nedbrytning till linjer. På grund av avsökningsfläckens ändliga dimensioner (öppning) begränsas även detta spektrum längs linjerna av frekvensen som är ömsesidig mot storleken på denna fläck. Det andra skälet till att begränsa frekvensspektrumet och bildsamplingen längs linjen är moduleringen av videosignalen av amplituderna, faserna eller frekvenserna för en ytterligare elektromagnetisk svängning - bärfrekvensen som är nödvändig för signalöverföring, till exempel i TV eller analogt fjärråtergivning (med hjälp av elektriska kommunikationskanaler). Tvådimensionell (i båda koordinaterna) sampling och kvantisering sker under den så kallade analog-till-digital-omvandlingen av en videosignal, som ett resultat av vilket en uppsättning rumsliga sampel av tonvärdet kan representeras av en viss array av siffror skrivna till exempel i binär kod. Denna representation låter dig ignorera tiden för faktisk skanning och utföra funktionella transformationer av ton, färg, små detaljer, konturer och annat bildinnehåll som operationer på numren i denna array. För sådana ändamål används datorer nu effektivt.
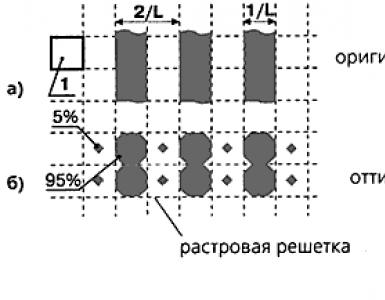
Spatial sampling åtföljer också rasterisering - representationen av en bild i form av en uppsättning tryckta och vita utrymmeselement, vars relativa yta bestäms av tonen eller färgen på motsvarande delar av originalet. I detta fall, som redan nämnts, tas frekvensen för den första samplingen i samband med elektrooptisk analys och analog-till-digital-omvandling vanligtvis vid dubbeltöverskridande av utskriftsrastrets linje, eller närmare bestämt frekvensen för rasterfunktionen, inom den period för vilken detta eller det antal rasterpunkter och mellanslag bildas. Om detta villkor är uppfyllt, då när man reproducerar ett system med periodiska drag av en godtycklig rumslig fas, kommer storlekarna på angränsande punkter att vara åtminstone något olika från varandra i alla fall utom ett: när slagen själva förskjuts med exakt hälften av period i förhållande till nedbrytningselement 1 och rastercellen. På utskriften, istället för linjer, bildas ett enhetligt fält av identiska rasterpunkter med en relativ yta på 50% (se fig. 2, d), eftersom reflektionskoefficienten för originalet, i medeltal över arean av läspunkten I, har samma (mellanliggande) värde för alla rasterelement. Varje gång faller ett halvt slag och ett halvt mellanslag in i referenszon 7 (se fig. 2, c). Detta fall liknar det som visas i fig. 1(b).

Ris. 2.
Slag med frekvens 0,51 i ett rastergitter av lineatur L med sammanfallande (a) och motsatta (c) faser; deras rasterkopior: b, d - med läselement 1 lika med linjestigningen; d - med avläsningar av 2 halvt mindre rastersteg.
I alla andra rumsliga faser, kontrasten av slag på reproduktioner visar sig vara högre, eftersom värdena för närliggande avläsningar och storlekarna på rasterprickarna som bildas i enlighet med dem skiljer sig åt. Den maximala skillnaden uppstår i det motsatta extremfallet, när, som visas i fig. 2 (a, b) är slag med frekvensen 0,51 i fas med rastergittret. Det finns en analogi här med fallet som illustreras i fig. 1 (a, c). De sänds med ett raster på två gånger lineaturen, lika med L linjer/cm, utan förlust av kontrast. En garanti för att sända slag med full kontrast, oavsett deras rumsliga fas, tillhandahålls av en nedbrytningsfrekvens som är två gånger rasterlinjen, som illustreras i fig. 2(d). Eftersom det vid tryckreproduktion finns minst två rumsliga diskretiseringar av bilden, följer det av det förenklade exemplet att en tvåfaldig marginal i nedbrytningsfrekvensen måste tillhandahållas två gånger. Första gången detta måste göras är när man väljer rasterlineaturen, om uppgiften är att återge vissa rumsliga frekvenser av originalet på utskriften. Den andra dubbelmarginalen, denna gång i förhållande till det valda linjärvärdet, ställs in för skanningsfrekvensen för originalet. Till exempel, för att reproducera streck som har en frekvens på 4 linjer/mm på originalet, krävs en utskriftslinje på 80 linjer/cm (~200 dpi) (liksom motsvarande pappersjämnhet och andra utskriftsparametrar). När du skannar ett sådant original är det nödvändigt att läsa det med en frekvens på 16 linjer/mm (~400ppi). Graden av förstörelse av konturer och små detaljer i rasterprocessen reduceras något om samplingsfrekvensen, i enlighet med bestämmelserna i provtagningsteorin, är två gånger rasterlineaturen (se fig. 3, e, f).

Ris. 3.
« Tratt" (a) och slumpmässig (b) fördelning av viktvärden; bilder av kontur 1, separerande områden på originalet med absorption på 0,94 och 0,04, baserat på en (c, d), fyra (e, f) och 64 (g, h) avläsningar per rasterperiod;
2 - analysreferenszon
Sektionen av originalet som skärs av konturen representeras i detta fall av fyra olika värden för avläsningar. Fyra fragment av motsvarande sektion av kopian bildas enligt olika tecken på "alfabetet" av prickar. Formen på området som skrivs ut inom området moduleras av konturens geometri, och den senare återges med större grafisk precision och skärpa. Denna effekt illustreras tydligt av modellen i fig. 4 (d) i jämförelse med de som presenteras i fig. 4(b,c).

Ris. 4.
Linjeelement i ett halvtonsoriginal och deras rasterkopior med:
- ett (b, c, e) och fyra (d, f) sampel under rasterfunktionens period;
- oskarp maskering av en numerisk matris (c);
- förskjutning av rasterpunkter (e) och deras fragment (f) på konturer.
Noggrannheten för överföringen av fullkontrastkonturen ökar ytterligare när frekvensen för att läsa originalet ökar och visar sig vara på nivån för utenhetens upplösning, när varje synteselement i den ursprungliga videomatrisen motsvarar en oberoende multi -nivåavläsning (se fig. 3, g, h). Provtagningszonerna är som regel nästan en storleksordning större än storleken på synteselementen och kan inte reduceras nämnvärt. Annars ökar de redan stora volymerna illustrationsfiler, som uppgår till tiotals och hundratals megabyte, överdrivet, i genomsnitt med två storleksordningar. Följaktligen ökar kapaciteten hos lagringsenheter, bearbetningstiden och utbytet av videoinformation mellan olika moduler och arbetsstationer i förtryckssystem, överföringstiden eller det upptagna frekvensbandet under fjärråtergivning. I praktiken är de begränsade till endast ett dubbelt överskott av samplingsfrekvensen över lineaturen, vilket motsvarar exemplen i fig. 3 (e, f) och fig. 4 (d). Sådana moder och reproduktionssystem klassificeras konventionellt som system av grovavsökning/fintryckstyp (grov läsning/finstilt). Antalet sampel är lika med antalet syntesunderelement, dvs. finskannings-/fintryckslägen, finns endast i enheter med kontinuerliga toner eller bläckstråleskrivare digital utskrift med relativt små bildformat, låga in-/utgångsupplösningar (cirka 12 -24 linjer/mm (300-600 dpi)) och i detta avseende låga linjer.









Rumslig sampling av kontinuerliga bilder lagrade på papper, fotografier och film kan uppnås genom skanning. För närvarande blir digitala foto- och videokameror som tar bilder omedelbart i diskret form allt mer utbredda.





Färgdjup och antal färger i paletten Färgdjup, i (bitar) Antal färger i paletten, N 42 4 = = = =
Bildskärmsgrafiklägen Kvaliteten på bilden på skärmen beror på den rumsliga upplösningen och färgdjupet. Den rumsliga upplösningen för en bildskärm definieras som produkten av antalet bildlinjer och antalet pixlar per linje. Monitorn kan visa information med olika rumsliga upplösningar (800*600, 1024*768, 1152*864 och högre).
Bildskärmsgrafiklägen Färgdjupet mäts i bitar per pixel och kännetecknar antalet färger som bildpixlar kan målas i. Antalet färger som visas kan också variera kraftigt, från 256 (8-bitars färgdjup) till över 16 miljoner (24-bitars färgdjup).


Grafiska monitorlägen Med jämna mellanrum, med en viss frekvens, visas punktfärgkoder på skärmen. Frekvensen av bildläsning påverkar bildens stabilitet på skärmen. I moderna monitorer sker bilduppdateringar med en frekvens på 75 eller fler gånger per sekund, vilket säkerställer en bekväm bilduppfattning av användaren. Exempel Låt oss ta reda på mängden videominne för ett grafikläge med en rumslig upplösning på 800x600 pixlar och ett färgdjup på 24 bitar. I P = i * X * Y = 24 bitar x 600 x 800 = bit = byte = 1 406,25 KB = 1,37 MB
Uppgift Skärmupplösning Färgdjup x x 768 Skärmen kan ha grafiklägen med färgdjup på 8, 16 och 24, 32 bitar. Beräkna mängden videominne i KB som krävs för att implementera ett givet färgdjup vid olika skärmupplösningar. Skriv in lösningen i tabellen.
Informationskällor: - Ugrinovich N. D. Lärobok Datavetenskap: lärobok för årskurs 9 / N. D. Ugrinovich - 4:e uppl. – M.: BINOM. Kunskapslaboratoriet, – 178 s.; - Ugrinovich N.D., Bosova L.L., Mikhailova N.I. Informatik och IKT: workshop / N. D. Ugrinovich, L. L. Bosova, N.I. Mikhailova - M.: BINOM. Kunskapslaboratoriet, – 394 sid. - Ugrinovich N.D. Datavetenskap och IKT-klasser: Metodologisk manual / N.D. Ugrinovich - M.: BINOM. Kunskapslaboratoriet, s.;

Kardinalproblemet med numerisk modellering av migrationsprocesser är diskretisering i rum och tid. Vid rumslig diskretisering används oftast finita differensmetoden (FDM) och finita elementmetoden.
|
Ris. 24. Schema för en kvadratisk cell i en rutnätsmodell för migrationsflöde: ■a - egenskapsparametrar; b - resultat av migrationsberäkning. / - primära resultat; 2 - bilinjär interpolation; 3 till 4 - beräknade och närliggande nätnoder. Poliser (FEM), vars huvudsakliga bestämmelser beskrivs till exempel i verk. I framtiden kommer vi bara att överväga MKR, vilket gör det möjligt för oss att tydligare presentera skillnadsmodellen för processen. I det här fallet används konservativa skillnadsscheman, som bygger på att rita upp balansen mellan materia i ett block (cell) relaterat till varje nodalpunkt (sammansatt cellmetod). I det här fallet, för varje cell, bestäms konvektiva inflöden och utflöden av migranter med hjälp av linjär interpolation mellan angränsande noder (vilket motsvarar huvudskillnaden i ICR) eller koncentrationsvärdet från noden från vilken migranten kommer (vilket motsvarar invers skillnad av ICR) används. För att bestämma inflödet och utflödet av migranter på grund av spridning, används också de första partiella derivaten av koncentrationen med vinkelrät och parallellt med cellgränserna, vilket kan fastställas bilinjärt från angränsande värden. Låt oss överväga de viktigaste bestämmelserna för att lösa diskretiseringsproblemet i förhållande till ett tvådimensionellt konvektivt-dispersivt flöde i ett homogent medium, med hänsyn till sönderfallsprocesserna enligt ekvation (3.8) vid Kos-Y och verkan av migrationskällor- sjunker med intensitet w. I detta fall har differentialekvationen för konvektiv-diffusionstransporten av en neutral migrant i ett tvådimensionellt flöde (med koordinater xt vid xx=x och x2-y) formen TOC \o "1-3" \h \z d / g\ ds \ , de i, ds, ID, ------ І + ^і------------ ac 4- w = l0 -- . (7.1) Om tecknet för q avslöjas endast som ett resultat av beräkning, är i allmänhet följande relation giltig: 2qmkc _ (gtnk _J_ gmk) ck _J_ (qtnk _ [ qmk I) Således erhålls ett linjärt ekvationssystem med n ekvationer (n är antalet celler med bestämda värden på c), vars asymmetriska matris av koefficienter indikerar varje fyra upptagna övre och nedre kodiagonaler tillsammans med huvuddiagonalerna . Beräkningsmigreringsmodeller som avbildas på detta sätt är ungefär likvärdiga med modeller (matrisekvationer) formulerade med normala MKR, såväl som MK-modeller. E med linjär approximation av funktioner. Fördelen med ett sådant system är att det garanterar maximal tydlighet i den matematiska beskrivningen av processen. För närvarande använder numerisk migreringsmodellering nästan uteslutande den första ordningens partiella skillnad för tidsderivatan och bygger en migreringsmodell som tar hänsyn till vikten av två tidsnivåer. Då har ekvation (7.1) för migrationsmodellen formen
Implicit (se fig. 25, b); y=\/2- Krank - Nicholson (se fig. 25, c); 7=2/3 - Galerkin (se fig. 25, c). För Vе (0; 2/3; 1) visar sig approximationsordningen vara 0(D0 och för y=: 1/2-0 (Dt) . Av expansionen av funktioner i Taylor-serien följer att den numeriska dispersion kallas som Kräver finprovtagning. Även att låta spridningskoefficienten DKop korrigeras enligt ekv. TOC \o "1-3" \h \z Asor = D - [I * I D*/2 + A^2/(2i0)] > 0 (7:6) Utesluter inte betydande kostnader för diskretisering^ För att karakterisera diskretiseringen av migreringsprocesser används måttlösa siffror, erhållna från ekvation (7.3): 0 I v I Ah Ah Dtv* Vid I v I Redh = --! f och Di Och att karakterisera svängningar - genom derivategenskaper ReLd: P0 Ah Ah P0 Ah2 Av ekvationen följer att betydande kostnader för rumslig diskretisering av migrationsprocesser är motiverade endast när tidsdiskretiseringsfelet också har samma storleksordning. Därför används Craik-Nicholson-schemat med ett fel i storleksordningen At2 ofta i simuleringar, trots de tillhörande stabilitetsproblemen. Dess ökning uppnås med "prediktor-korrigeringsmetoden G10]. I detta fall, enligt det implicita lösningsschemat (Y = 1), beräknas halvsteget At/2 vid den initiala positionen för alla parametrar vid tidpunkten t och värdena c*+A(12) bestäms. Sedan, enligt Craik-Nicholson-schemat (y = 1/2), implementeras hela steget At, och alla migreringsparametrar, käll-sänktermer, utbyte och ersättning, såväl som konvektionstermen specificeras vid tidpunkten t + Vid / 2. Således erhålls beräkningsmodellen av ekvation (7.2) med ett helt steg i denna form (se fig. 25): För dc/dt är det dessutom nödvändigt att ersätta en en-, två- eller tredimensionell ursprunglig differentialekvation och med d2c/dt2 dess derivata. Slutligen uppnås en mycket betydande approximationsnoggrannhet på grund av det faktum att tidsderivatan tas med i beräkningen inte bara vid punkt n (detta gäller i allmänhet även käll-sänktermerna ic och da), utan även vid angränsande noder. I sin enklaste form utförs denna substitution enligt Simpsons regel: dc/dt-(1/6) [(dc/dt)a-.i+4(dc/dt)n+(dc/di)n-1 ]. I fig. 25f visar också ett schema med ändlig skillnad för endimensionella migrationsprocesser föreslagit av G. Stoyan. Detta schema gör det möjligt att kontrollera beräkningen av alla partiella derivator och erhålla stabila och exakta numeriska lösningar, speciellt för fall av ren dispersion eller ren konvektion. Den valda numeriska metoden är endast lämplig i de fall där den numeriska lösningen tenderar att vara exakt med minskande bredd. steg, dvs när denna metod är konvergent. Numerisk spridning orsakas i första hand av diskretiteten hos termerna: konvektion och kapacitans (ackumulering), d.v.s. de första derivatorna av de beroende variablerna. Detta kan leda till betydande fel vid modellering av migreringsprocesser med? en liten spridningskoefficient £>, vars värde för olika numeriska migrationsmodeller erhålls beroende på Pe^lr och talet Di eller Cr. Tack vare introduktionen av fixen< ленных. коэффициентов дисперсии [см., например, уравнение (7.6)] значительно уменьшаются погрешности и в простых дискретных схемах. (Стабильные обратные разности членов конвекции и аккумуляции, а также МК. Э с линейными пространственными и временными начальными функциями приводят к значительной численной дисперсии или требуют очень тонкой локальной и временной дискретизации. Numeriska svängningar uppstår under vissa förhållanden och bestäms som regel genom jämförelse med motsvarande analytiska lösningar. Faran för svängningar uppstår främst i processer med dominerande konvektion. Särskilt känsliga för oscillation är Crank-Nicholson-schemat, de grundläggande skillnaderna för konvektion eller ackumulering och FEM-formuleringen Tillsammans med diskrethetsfel är stabilitetsfel som är ett resultat av ett begränsat antal numeriska beräkningar också viktiga. En numerisk migreringsmodell anses vara ovillkorligt stabil om det numeriska felet (avrundningen) minskar från ett tidssteg till ett annat, och villkorligt stabil om detta sker endast under vissa förhållanden. Dessa villkor för specialfall presenteras analytiskt i arbetet. Sålunda, genom jämförelse med analytiska lösningar, fixeras stabilitetsvillkoret för en given rumslig diskretisering genom att fastställa det kritiska värdet för tidssteget genom de kritiska talen Di eller Cr. Det implicita lösningsschemat med y-1 är säkert stabilt, och när y minskar ökar tendensen till instabilitet. Den numeriska lösningen av det kompilerade ekvationssystemet (matrisekvationen) är också fylld med möjligheten till fel. Mycket stora fel, som sprider sig mycket med den villkorliga stabila metoden, kan orsakas av att lösa ett ekvationssystem med dåligt uttryckta förhållanden, där elementen i koefficientmatrisens huvuddiagonaler är otillräckligt dominerande jämfört med koddiagonalernas huvuddiagonaler. . Betydande fel vid ekvationslösning kan orsakas genom att lösa hela ekvationssystemet med hjälp av en partiell metod av steg (till exempel den implicita metoden att alternera riktningar) och överföra element i koefficientmatrisen till höger sida av ekvationerna genom att multiplicera med tid eller iterativt beroende variabler med bakåtdatering för att skapa remsmatriser med en liten tejpbredd (främst tridiagonala koefficientmatriser). Av denna anledning bör datorprogram för numerisk migrationsmodellering noggrant kontrolleras och övervakas, särskilt genom jämförelse med analytiska lösningar. Baserat på den numeriska lösningen görs den initiala bestämningen av antalet referenspunkter i rum-tid-rutnätet. Antalet referenspunkter i tid eller i storleken på iterationssteget i en icke-linjär lösning indikerar antalet fastställda lokalt diskreta värden för de beroende variablerna (R eller ibland vx, vy, c) och påverkar därmed antalet ekvationer av systemet. Den tid som spenderas på en engångslösning av detta ekvationssystem är huvudvärdet för att uppskatta kostnader; de beror på typen av dator, metoden som används för att lösa systemet med 124 ekvationer och kvaliteten på det genererade datorprogrammet. Om dessa kostnader multipliceras med antalet tids- eller iterationssteg som krävs för modellering, och adderas till detta den tid som går åt för att justera koefficientmatriserna och den högra sidan av ekvationerna, får vi den tid som krävs för matematisk modellering på en dator . Behovet av lagringsutrymme för matematisk modellering av flerdimensionella migrationsprocesser bestäms i första hand av behovet av lagringsutrymme för en subrutin för att lösa ett ekvationssystem. |

Rumslig provtagning. Under kodningsprocessen diskretiseras en bild rumsligt. Bilden är uppdelad i separata små fragment - prickar. varje fragment tilldelas ett värde på dess färg, det vill säga en färgkod (röd, grön, blå och så vidare). Kvaliteten på bildkodningen beror på två parametrar: punktstorlek - ju högre kvalitet på bildkodningen, mindre prickstorleken och följaktligen desto större antal punkter som bildar bildar. antal färger - ju fler färger som används, desto bättre är bilden kodad (varje punkt innehåller mer information). Kombinationen av färger som används i en uppsättning bildar en färgpalett.

Bildande av en rasterbild. Grafisk information på skärmen presenteras i form av en rasterbild, som är bildad av ett visst antal linjer, som i sin tur innehåller ett visst antal punkter (pixlar). Bildkvaliteten bestäms av bildskärmens upplösning, d.v.s. antalet punkter som den är sammansatt av. Ju högre upplösning, det vill säga ju fler rasterlinjer och punkter per rad, desto högre bildkvalitet. I moderna persondatorer används vanligtvis tre huvudskärmupplösningar: 800 x 600, 1024 x x Bilden är svartvit utan gråskala och består av 600 linjer med 800 punkter i varje rad (totalt punkter), sedan kan varje punkt på skärmen har ett av två tillstånd "svart" eller "vit", det vill säga 1 bit behövs för att lagra dess tillstånd. Färgbilder genereras enligt den binära färgkoden för varje pixel som lagras i videominnet. Färgbilder kan ha olika färgdjup, som bestäms av antalet bitar som används för att koda färgen på en punkt. De vanligaste färgdjupen är 8, 16, 24 eller 32 bitar.

Kvaliteten på den binära kodningen av en bild bestäms av skärmupplösningen och färgdjupet. Varje färg kan betraktas som ett möjligt tillstånd för en punkt, sedan kan antalet färger som visas på skärmen beräknas med formeln N = 2 I, där I är färgdjupet Bildning av en rasterbild

Färgdjup och antal visade färger Färgdjup (I) Antal visade färger (N) 82 8 = (Hög färg)2 16 = (True Color)2 24 = (True Color)2 32 = Färgbilden på skärmen bildas genom att blanda tre grundfärger: röd, grön och blå. Denna färgmodell kallas RGB-modellen efter de första bokstäverna i de engelska färgnamnen (röd, grön, blå). För att få en rik palett av färger kan basfärgerna ges olika intensiteter. Till exempel, med ett färgdjup på 24 bitar, tilldelas 8 bitar för varje färg, det vill säga för varje färg är N = 2 8 = 256 intensitetsnivåer möjliga, specificerade i binära koder (från minimum till maximum)

Bildande av färger vid ett färgdjup på 24 bitar Färgnamn Intensitet RödGrönBlå Svart Röd Grön Blå Cyan Gul Vit

Grafiskt läge. Det grafiska läget för att visa en bild på en bildskärm bestäms av upplösningen och färgdjupet. För att en bild ska kunna bildas på skärmen måste information om var och en av dess punkter (punktens färgkod) lagras i datorns videominne. Exempel 1 Låt oss beräkna den nödvändiga mängden videominne för ett av grafiklägena, till exempel med en upplösning på 800 x 600 pixlar och ett färgdjup på 24 bitar per pixel. Totalt antal punkter på skärmen: = Nödvändig mängd videominne: 24 bitar = bitar = byte = 1406,25 KB = 1,37 MB. Den erforderliga mängden videominne för andra grafiklägen beräknas på samma sätt. Windows ger möjlighet att välja ett grafikläge och konfigurera inställningar för datorns videosystem, som inkluderar en bildskärm och videoadapter.

Exempel 2 En färgbild av cm-storlek skannas, skannerupplösningen är 600 dpi och färgdjupet är 32 bitar. Vilken informationsvolym kommer den resulterande grafikfilen att ha?

Lösning Låt oss konvertera skannerupplösningen från punkter per tum till punkter per centimeter: 600 dpi: 2, punkter/cm Därför blir bildstorleken i punkter punkter. Det totala antalet bildpixlar är: = Filens informationsvolym är: 32 bitar = 21,25 MB bitar

Frågor 1.Vad är kärnan i den rumsliga samplingsmetoden? 2.Förklara principen för att skapa en rasterbild. 3. Vilka parametrar ställer in det grafiska läget i vilket bilderna visas på skärmen? Uppgifter Använder grafiklägen med färgdjup på 8, 16, 24 och 32 bitar. Beräkna mängden videominne som krävs för att implementera dessa färgdjup vid olika skärmupplösningar.

Bearbetning av grafisk information
Kodning och bearbetning av grafisk och multimedial information
Rumslig provtagning
Grafisk information kan presenteras i analog Och diskret formulär. Ett exempel på en analog representation av grafisk information är en målning vars färg ändras kontinuerligt, och en diskret är en bild som skrivs ut med en bläckstråleskrivare och som består av individuella punkter i olika färger.
Grafiska bilder konverteras från analog (kontinuerlig) till digital (diskret) form av rumslig provtagning. Rumslig sampling av en bild kan jämföras med att konstruera en bild från en mosaik (ett stort antal små flerfärgade glasögon). Bilden är uppdelad i separata små element (prickar, eller pixlar), och varje element kan ha sin egen färg (röd, grön, blå, etc.).
Pixel- den minsta delen av bilden för vilken färgen kan ställas in oberoende.
Som ett resultat av rumslig diskretisering presenteras grafisk information i formuläret bitmapp, som är bildad av ett visst antal linjer, som i sin tur innehåller ett visst antal punkter (fig. 1.1).
Upplösning. Den viktigaste egenskapen för kvaliteten på en rasterbild är upplösningen
UpplösningEn rasterbild bestäms av antalet pixlar, både horisontellt och vertikalt, per längdenhet av bilden.
Ju mindre punktstorlek, desto högre upplösning (fler rasterlinjer och punkter per linje) och följaktligen desto högre bildkvalitet. Upplösningsvärdet uttrycks vanligtvis i dpi(dot per inch - dots per inch), dvs antalet punkter i en bildremsa en tum lång (1 tum = 2,54 cm)
Rumslig sampling av kontinuerliga bilder lagrade på papper, fotografier och film kan uppnås genom skanning. För närvarande blir digitala foto- och videokameror som tar bilder omedelbart i diskret form allt mer utbredda.
Kvaliteten på rasterbilder som erhålls som ett resultat av skanning beror på skannerns upplösning, som tillverkare anger i två siffror (till exempel 1200 x 2400 dpi)
Skanning utförs genom att flytta en remsa av ljuskänsliga element längs bilden. Den första siffran är optisk upplösning skannern och bestäms av antalet ljuskänsliga element per tum remsa. Det andra numret är hårdvaruupplösning; det bestäms av antalet "mikrosteg" en remsa av ljuskänsliga element kan göra när den rör sig en tum längs bilden.
Färgdjup. Provtagningsprocessen kan använda olika färgpaletter, d.v.s. uppsättningar av färger i vilka bildpunkter kan målas. Varje färg kan betraktas som ett möjligt tillstånd för en punkt. Antalet färger N i paletten och mängden information jag behövde för att koda färgen på varje punkt är relaterade och kan beräknas med formeln:
I det enklaste fallet (en svartvit bild utan gråskala) består färgpaletten av endast två färger (svart och vit). Varje punkt på skärmen kan ta ett av två tillstånd - "svart" eller "vit", därför kan vi med formeln (1.1) beräkna hur mycket information som behövs för att koda färgen på varje punkt.